

近未来的な容姿を持つロボット犬は、荷物の運送、ペットとしてのリラックス効果、危険地帯作業、災害現場救助など様々な用途が期待され、世界各地で開発が急速に進められています。
様々な4足歩行ロボットのなか、先駆けのボストン・ダイナミクス(Boston Dynamics)の「Spot(スポット)」が良く知られていますね。

蹴られたり滑ったりしてもバランスをうまくとって態勢を戻して転ばない、ユニークな姿が動画で話題となりました。7月7日には、コロナウイルス感染防止のため無観客となった福岡ソフトバンクホークスの応援のために、人型ロボット「ペッパー」20台とスポット20台が並んでダンスを披露したことでも話題となりました。もともとは工事現場などの工業用ロボットとして開発が進められてきた四足歩行ロボットですが、今後の様々な利用法が期待されています。
本日はロボットベンチャーであるユニツリー・ロボティクス(Unitree Robotics)が研究・生産し、一般消費者向けに発売した、四本足歩行ロボット犬「A1」を紹介します。

従来のロボット犬と比べると、小型化、運動性能向上、低価格に開発されました。先にご紹介したSpotの価格は非公表ですが、少なくても800万円以上と言われています。Unitree社のA1が100万円台となっており、かなり安価になりました。将来的に一家一台のリアリティーが出ましたね!
本編が始まる前に、先に「A1」のキレキレのダンス動画を楽しんでください、最後の尻尾を見逃しなく!
製品動画
まずは、「A1」が段差のある道や人がいる道路でもサクサク走ったり、自動追尾したり、障害物回避したり、リードを付けてお散歩をする様子をご覧ください。
次は、バランスと階段上りのテストの動画です。
A1の簡単紹介
A1のサイズは中型犬程度、最新テクノロジーを搭載した高い運動性能(バク転など)を持ち、強い動力および優れた制御算出法により坂を上ったり、自主バランス能力により不規則な地形も自由に散歩できます。
本体にはメーカー自社開発の高性能モーター、ジャイロセンサー、足先には力覚センサーを搭載。力覚情報とジャイロの姿勢情報の高速なフィードバック制御によって、悪路、段差、階段でも転倒しにくい安定性を実現しました。

本体質量は12kg、可搬質量は5kg、ある程度の荷物を預けられます。
平地での最大走行速度は時速11.8kmです。3Dカメラ、Visual SLAMや衝突回避といった機能も搭載されました。

様々な動作が可能
四足歩行ロボットは、走る、階段上り、バク宙、後退など様々な動作が可能です。以下はバク宙の映像です。
優れた運動性能
屋外での最高走行速度は11.88 km/h (秒速3.3 m)。
成人男性のジョギングの速度と同等ですので、ランニング等での同伴者としても可能です。
有名な「SPOT」の最高速度が約6 km/h(1.6 m/s)だということを考慮すると、2倍も速くなっています。
軽くて高い安定性

重量は約5 kgと軽く、且つ高度な動的バランスアルゴリズムにより、衝撃を受けたり、落下したりしても、すぐにバランスを取れます。
スマート・デプスカメラ(深度計測カメラ)を搭載
- リアルタイム HD映像伝送
- マルチアイ技術
- 赤外線ステレオ深度テクノロジー
- 検出距離 0.3 ~ 10 m
- エラー率はわずか2%(2m以内)
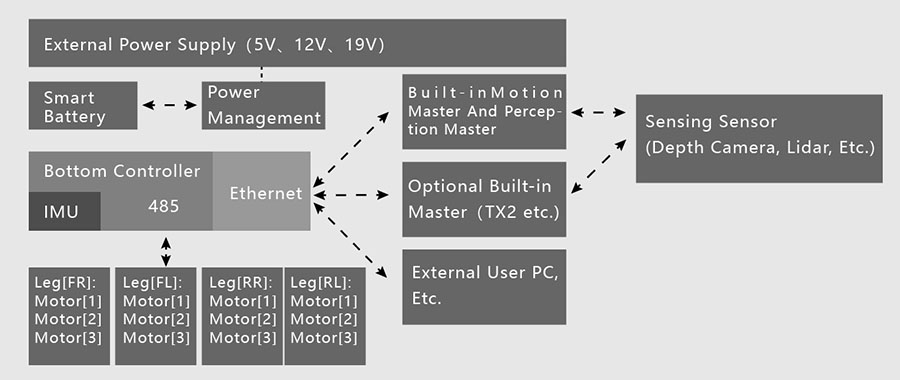
優れた構造とレイアウトデザイン
- 強度が高く、軽量なボディ構造で、メンテナンスはより簡単に。
- 24V外部電源入力インターフェイスと5V、12V、19Vの外部出力電源があり、各種拡張機器の外部接続に便利。
- 高性能デュアルマスターコントロール(センシングマスターコントロール、モーションマスターコントロール)を標準装備。
- 豊富な外部インターフェース: USB3.0 x 4、HDMI x 2、Ethernetポート x 2
- マスター制御をTX2等にアップグレード可能。
- リアルセンス深度カメラを標準装備。地図の作成および障害物回避機能を提供します。
足先にセンサーを内蔵

- A1は各足先に力センサを内蔵。動作中常に足の接触状態をリアルタイムで感知。
- ジョイントモータの現在の知覚のみを用いてエンコーダ誤差、慣性センサ誤差、伝送ギャップ誤差などを推定する場合と比較して、より精度の高い計測を行うことが可能。
- プログラムでは、ハードウェアフォースセンサーとモーターの電流情報が統合されており、感度と信頼性が向上。
- 足先は防塵防水で、簡単に交換可能。
ターゲット自動追尾機能

- ターゲット人物を追従したり、動きに応じてジェスチャーやターゲット人物の切り替えが可能です。
- 視覚範囲内のオブジェクト (人や特定の移動体) をリアルタイムで追跡。
- ターゲットの追跡機能のオンライン学習をサポート。トラッキングのロバスト性に優れています。
- ビデオストリームのリフレッシュレートは25 ~ 30フレーム/秒に達します
- トラッキングボックスの色により、トラッキング対象の信頼度をリアルタイムに表示することができます。(green(100%) ~ red(0%))
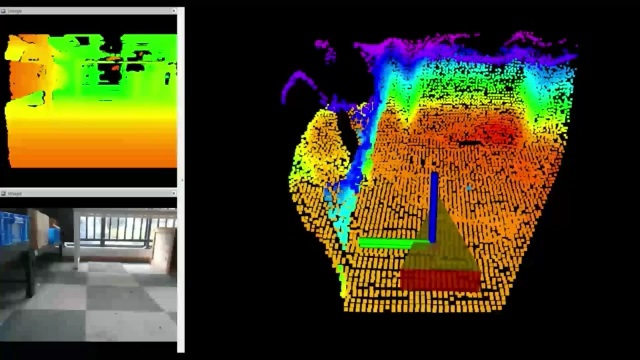
自動障害物回避機能

3Dカメラを搭載したVisual SLAM技術で、周囲の障害物や人間との衝突を回避したり、顔認識で人物を特定するなどの機能を持つ。
- ロボットの視角範囲0.8m以内の障害物を自律的に回避。
- ロボットの視野範囲内にある障害物の分布をリアルタイムで検出し、自分の位置を調整します。
- ロボット本体の調整角度、視野範囲内の最大距離と面積、歩行軌跡の範囲をリアルタイムで表示します。
親しみやすいユーザーインターフェ―ス
- イーサネット経由でロボットに内蔵されているデュアルメインコントロールとボトムコントローラに直接接続することができ、視覚などのリアルタイムのデータ送信に便利です。
- 低レベルのコントロールへのアクセス - ロボットのすべてのモーターとセンサーをリアルタイムで読み取り、制御できます。オープンソースのロボットアルゴリズムを直接使用するのは簡単です。
- 高レベルのコントロールへのアクセス - 前進、後退、左、右などの高レベルの移動コマンドをロボットに直接送信できます。
ソフトウェアとハードウェアの究極の信頼性

- Unitree社は4足歩行ロボットの分野で6年以上の専門的な設計経験を持っています。
- 2020年のCESでA1は約80回の後方宙返りのデモを行いました。
- 閉ループ宙返りアルゴリズムを用いて、モーションの安定性を確保しています。
様々な用途に利用可能
- 各種イベント
- セキュリティサービス
- デリバリーサービス
- 付き添い介護
- 荷物の運送
- ペットのお替り
- 危険地帯の作業
- 災害現場の救助作業
上位版は高性能LiDARの組込み可能
- 研究・開発者向けには、標準のA1に、LIDARの追加搭載したA1 Explorerのバージョンもあります。
- コントローラも標準のRaspberry Pi 4からJetson TX2にアップグレードされております。
- LIDARによる360度のセンシングと高性能なTX2のコンピューティングパワーで、SLAMや機械学習などアドバンスドなアプリケーションにご活用いただくことが可能です。
仕様
■ロボット
本体重量(バッテリーを含む):12kg±1kg
寸法 (LxWxH):立脚時 500 x 300 x 400 mm
寸法 (LxWxH):折畳時 450 x 300 x 150 mm
■歩行性能
歩行速度: 3.3m/s(11.8km/h)
可搬重量:5.0kg
駆動時間: 1 - 2.5 時間
カメラ解像度: 1080p
合計地涌度 12 DOF
最大登坂角度:20度
■マシン・搭載コンピュータ・センサー
Force Sensor:4コ搭載(足先)
自由度(サーボモータ数) :12
胴体IMUの数 :1
胴体のIMU自由度 :6
各足自由度(モーター数) :3
オンボードコンピュータ搭載
Ubuntu(Real-Time)を搭載したロボット
ユーザコントロールインターフェース:USBまたはイーサーネットインター
外部インターフェイス HDMI x 2、Ethernet x 2、USB 3.0 x 4
■機能
保護 緊急停止、落下保護、オーバーヒート
警告システム 電源容量低下、ロボット温度、回路ショート、過電流
リアルタイムOS モーションコントロール : Ubuntu / 環境認識 : Ubuntu-ROS
脚部フォースセンサ フットサポート情報
電源出力 5V、12V、19V
メーカーについて
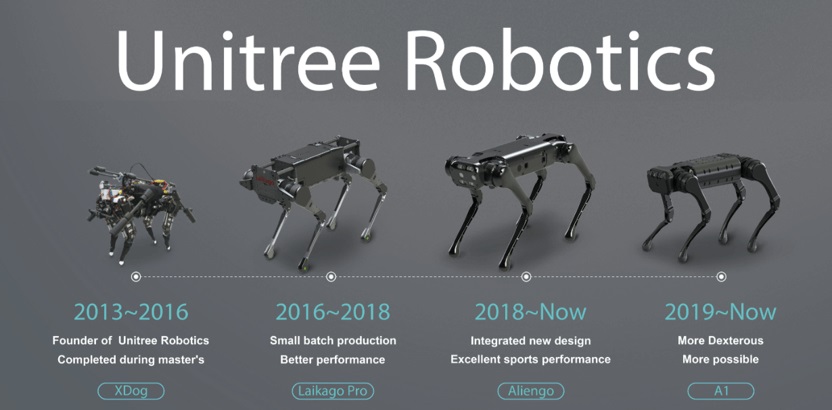
A1のメーカーUnitree社は低価格・軽量・安定した運動性能を持つ電動の4足歩行ロボットを開発するロボットベンチャー。2016年の創業以来、AlienGo、A1などの4足歩行ロボットを複数開発する。4足歩行ロボットを手軽に幅広い分野で利用してもらう環境を目指します。